Wykład 2: Mocna własność Markowa
2024-10-10
Piotr Dyszewski
Pojęcie czasu zatrzymania odgrywa kluczową rolę w teorii procesów stochastycznych. Są to losowe momenty adaptowalne do z góry zadanej filtracji. Jest to kluczowa koncepcj w silnej własności Markowa. Będziemy korzystać z ciągłej filtracji \(\mathbb{F}=( \mathcal{F}_t )_{t \in \mathbb{R}_+}\).
Czasy zatrzymania
Przypomnijmy, że w czasie dyskretnym definicja czasu zatrzymania \(\tau\) jest taka, że \(\{ \tau = n \} \in \mathcal{F}_n\) dla każdego naturalnego \(n\). Jest to równoważne z warunkiem, że \(\{ \tau \leq n \} \in \mathcal{F}_n\) dla każdego naturalnego \(n\). W czasie ciągłym ta równoważność nie zachodzi, ponieważ \([0, \infty)\) nie jest przeliczalne. Warunek analogiczny do tego drugiego jest naturalny do użycia w czasie ciągłym, ponieważ zazwyczaj zdarzenie \(\{ \tau = t \}\) ma zerowe prawdopodobieństwo dla każdego \(t\).
Definicja 4 Zmienna losowa \(\tau : \Omega \to [0, \infty]\) nazywana jest \(\mathbb{F}\)-czasem zatrzymania, jeśli \(\{ \tau \leq t \} \in \mathcal{F}_t\) dla każdego \(t \geq 0\).
W niektórych kontekstach filtracja \(\mathbb{F}\), z którą pracujemy, jest na tyle regularna, że ułatwia to weryfikację, czy zmienna jest czasem zatrzymania.
Definicja 5 Powiemy, że filtracja \(\mathbb{F} = (\mathcal{F}_t)_{t \in \mathbb{R}_+}\) jest prawostronnie ciągła, jeżeli \[ \mathcal{F}_t = \mathcal{F}_{t_+}, \qquad \text{gdzie} \qquad \mathcal{F}_{t+} := \bigcap_{s > t} \mathcal{F}_s \] dla każdego \(t \in \mathbb{R}_+\).
Zadanie 1 Załóżmy, że filtracja \(\mathbb{F}\) jest prawostronnie ciągła. Wówczas \(\tau\) jest czasem zatrzymania wtedy i tylko wtedy, gdy \(\{ \tau < t \} \in \mathcal{F}_t\) dla każdego \(t \in \mathbb{R}_+\).
Zadanie 2 Pokaż, że jeśli \(\tau_1\) i \(\tau_2\) są czasami zatrzymania, to również \(\tau_1 \wedge \tau_2\), \(\tau_1 \vee \tau_2\) i \(\tau_1 + \tau_2\) są czasami zatrzymania.
Zadanie 3 Udowodnij, że jeśli \(\{\tau_n\}_{n \in \mathbb{N}}\) jest ciągiem czasów zatrzymania, które maleją do \(\tau\), to \(\tau\) jest czasem zatrzymania.
Własność Markowa dotyczy warunkowej wartości oczekiwanej względem \(\mathcal{F}_s\) dla ustalonego \(s\).
Mocna własność Markowa jest analogiczna, ale warunkowanie odbywa się względem \(\sigma\)-algebry \(\mathcal{F}_\tau\),
gdzie \(\tau\) jest czasem stopu.
Składa się ona ze zdarzeń, które są określone przez przeszłość aż do czasu \(\tau\).
Definicja 6 Dla czasu zatrzymania \(\tau\) kładziemy \[ \mathcal{F}_\tau = \left\{ A \in \mathcal{F} : A \cap \{ \tau \leq t \} \in \mathcal{F}_t \text{ dla każdego } t \in \mathbb{R}_+ \right\}. \]
Zadanie 4 Pokaż, że:
- \(\mathcal{F}_\tau\) jest \(\sigma\)-algebrą,
- Załóżmy, że \(\mathbb{F}\) jest prawostronnie ciągła. Pokaż, że \[ \mathcal{F}_\tau = \{ A : A \cap \{ \tau < t \} \in \mathcal{F}_t \text{ dla każdego } t \geq 0 \}. \]
Oto niektóre podstawowe własności \(\mathcal{F}_\tau\).
Twierdzenie 4 Jeśli \(\tau\), \(\tau_n\), \(n \in \mathbb{N}\) są czasasmi zatrzymania, to:
- \(\tau\) jest mierzalny względem \(\mathcal{F}_\tau\).
- Jeśli \(\tau_n \downarrow \tau\), to \(\mathcal{F}_\tau = \bigcap_n \mathcal{F}_{\tau_n}\).
- \(\tau_1 \leq \tau_2\) implikuje \(\mathcal{F}_{\tau_1} \subseteq \mathcal{F}_{\tau_2}\).
Proof. Zadanie.
Mocna własność Markowa
Twierdzenie 5 Niech \((\mathbb{P}, \mathbb{F})\) będzie łańcuchem Markowa na przeliczalnej przestrzeni stanów \(S\). Załóżmy, że \(Y\) jest ograniczoną zmienną losową oraz że \(\tau\) jest czasem zatrzymania. Wówczas dla każdego \(x \in S\), \[\begin{equation} \mathbf{E}_x [ Y \circ \theta_\tau | \mathcal{F}_\tau] = \mathbf{E}_{X(\tau)} [Y] \quad \mathbf{P}_x-\text{prawie na pewno} \quad \text{na} \quad \{\tau < \infty\}. \tag{2} \end{equation}\]
Silna własność Markowa jest zazwyczaj używana w następujący sposób: Przemnóż równość (2) przez \(\mathbf{1}_{\{\tau < \infty\}}\), a następnie zastosuj \(\mathbf{E}_x\). Wynik, z uwzględnieniem, że \(\{\tau < \infty\} \in \mathcal{F}_\tau\), to: \[ \mathbf{E}_x \left[ Y \circ \theta_\tau \mathbf{1}_{\{\tau < \infty\}} \right] = \mathbf{E}_x \left[ \mathbf{E}_{X(\tau)} \left[ Y \right] \mathbf{1}_{\{ \tau < \infty\}} \right]. \]
Proof (Twierdzenia 5). Najpierw załóżmy, że \(\tau\) przyjmuje wartości z przeliczalnego zbioru \(0 \leq t_1 \leq t_2 \leq \dots\) oraz \(\infty\). W tym przypadku silna własność Markowa sprowadza się do własności Markowa, jak teraz pokażemy.
Zauważmy, że prawa strona (2) jest mierzalna względem \(\mathcal{F}_\tau\). Musimy więc sprawdzić, że jeśli \(A \in \mathcal{F}_\tau\) oraz \(A \subseteq \{\tau < \infty\}\), to \[ \mathbf{E}_x \left[ Y \circ \theta_\tau \mathbf{1}_A \right] = \mathbf{E}_x \left[ \mathbf{E}_{X(\tau)} \left[ Y \right] \mathbf{1}_A \right]. \] Aby to wykazać, napiszmy: \[\begin{multline*} \mathbf{E}_x \left[ Y \circ \theta_\tau \mathbf{1}_A \right] = \sum_{n \in \mathbb{N}} \mathbf{E}_x \left[ Y \circ \theta_{t_n} \mathbf{1}_{A \cap \{\tau = t_n\}} \right] \\ = \sum_{n \in \mathbb{N}} \mathbf{E}_x \left[ \mathbf{E}_{X(t_n)} \left[ Y \right] \mathbf{1}_{ A \cap \{\tau = t_n\}} \right] =\mathbf{E}_x\left[ \mathbf{E}_{X(\tau)}[Y] \mathbf{1}_A\right]. \end{multline*}\] W drugim kroku skorzystaliśmy z własności Markowa, ponieważ \[ A \cap \{\tau = t_n\} \in \mathcal{F}_{t_n} \] zgodnie z definicją \(\mathcal{F}_\tau\).
W drugim kroku uzasadnimy tezę dla dowolnych \(\tau\) i \(Y\) postaci \[\begin{equation} Y(\omega) = \prod_{j=1}^m f_j(\omega(t_j)), \tag{3} \end{equation}\] dla pewnego \(m \in \mathbb{N}\), \(t_1, \ldots, t_m \in \mathbb{R}_+\) oraz ograniczonych funkcji \(f_1, \ldots, f_m \colon S \to \mathbb{R}\).
Czas \(\tau\) przybliżamy go od góry czasami stopu \(\{\tau_n\}_{n \in \mathbb{N}}\) zdefiniowanymi przez \[ \tau_n = \frac{k + 1}{2^n} \quad \text{jeśli} \quad \frac{k}{2^n} \leq \tau < \frac{k + 1}{2^n}. \] dla dostatecznie dużych \(k\). Weźmy teraz \(A \in \mathcal{F}_\tau \subseteq \mathcal{F}_{\tau_k}\) takie, że \(A \subseteq \{\tau < \infty\}\). Z pierwszej części dowodu, \[ \mathbf{E}_x \left[ Y \circ \theta_{\tau_k} \mathbf{1}_A \right] = \mathbf{E}_x\left[ \mathbf{E}_{X(\tau_k)}[Y] \mathbf{1}_A \right]. \] Musimy przejść do granicy, gdy \(k \to \infty\). Po prawej stronie, \(\tau_k \downarrow \tau\) i z prawostronnej ciągłości \(X(\tau_k) \to X(\tau)\) w \(S\), czyli \(X(\tau_k) = X(\tau)\) dla dostatecznie dużych \(k\). Po lewej stronie, napiszmy \[\begin{equation*} \left( Y \circ \theta_{\tau_k} \right)(\omega) = \prod_{m=1}^n f_m(\omega(t_m + \tau_k)) \to \prod_{m=1}^n f_m(\omega(t_m + \tau)) = \left( Y \circ \theta_\tau \right)(\omega). \end{equation*}\] kiedy \(k \to \infty\), dzięki prawostronnej ciągłości ścieżek. To pokazuje tezę: \[ \mathbf{E}_x \left[ Y \circ \theta_\tau \mathbf{1}_A \right] = \mathbf{E}_x \left[ \mathbf{E}_{X(\tau)}[Y] \mathbf{1}_A \right]. \] W ostatnim kroku dowodu pokażemy tezę dla dowolnego \(Y\). Dla dowolnego \(m \in \mathbb{N}\) oraz \(t_1, \ldots, t_m \in \mathbb{R}_+\) rozważmy \(\pi_{t_1, \ldots, t_m} \colon \Omega \to \mathbb{R}^m\) dane wzorem \[\begin{equation*} \pi_{t_1, \ldots, t_m}(\omega) = (\omega(t_1), \omega(t_2), \ldots, \omega(t_m)). \end{equation*}\] Wówczas dla dowolnych \(A_1, A_2, \ldots, A_m \subseteq S\), \[\begin{equation*} \pi_{t_1, \ldots, t_m}^{-1}[A_1\times A_2 \times \ldots \times A_m ] = \{ \omega \in \Omega \: : \: \omega(t_1) \in A_1, \ldots, \omega(t_m) \in A_m \}. \end{equation*}\] Rozważmy teraz \(\pi\)-układ \[\begin{equation*} \mathcal{B} = \left\{ \pi_{t_1, \ldots, t_m}^{-1}[A_1 \times A_2 \times \ldots \times A_m ] \: : \: m \in \mathbb{N}, t_1, \ldots , t_m \in \mathbb{R}_+, \: A_1, \ldots , A_m \subseteq S \right\}. \end{equation*}\] oraz \(\lambda\)-układ \[\begin{equation*} \mathcal{L} = \left\{ G \in \mathcal{F} \: : \: \mathbf{P}_x \left[ \theta_\tau \in G, A \right] = \mathbf{E}_x \left[ \mathbf{P}_{X(\tau)} \left[ G \right] \mathbf{1}_{ A } \right] \text{ dla } A \in \mathcal{F}_\tau, \: A \subseteq \{\tau < \infty\} \right\}. \end{equation*}\] Aproksymując \(\mathbf{1}_{\pi_{t_1, \ldots, t_m}^{-1}[A_1 \times \ldots \times A_m]}\) zmiennymi \(Y\) postaci (3), dostajemy \(\mathcal{B} \subseteq \mathcal{L}\). Z lematu o \(\pi\)-\(\lambda\) układach mamy \(\mathcal{F} = \sigma(\mathcal{B}) \subseteq \mathcal{L}\). Czyli dla każdego \(G \in \mathcal{F}\), \[\begin{equation*} \mathbf{P}_x \left[ \theta_\tau \in G, A \right] = \mathbf{E}_x \left[ \mathbf{P}_{X(\tau)} \left[ G \right] \mathbf{1}_{A} \right] \end{equation*}\] dla każdego \(A \in \mathcal{F}_\tau\) takiego, że \(A \subseteq \{\tau < \infty\}\). Jest to równoważne naszej tezie dla \(Y = \mathbf{1}_G\). Z liniowości teza jest zatem prawdziwa dla każdego \(Y\) przyjmującego skończenie wiele wartości. Zastosowanie standardowego twierdzenia granicznego dowodzi tezy dla dowolnego ograniczonego \(Y\).
Charakteryzacja
Zauważmy, że każda funkcja \(\omega \in \Omega\) musi być następującego typu: Istnieje \(t_1 \in (0, \infty]\), taki że \(\omega(t) = \omega(0)\) dla każdego \(t \in [0, t_1)\), następnie, jeśli \(t_1 < \infty\), istnieje \(t_2 \in (t_1, \infty]\) taki, że \(\omega(t) = \omega(t_1) \neq \omega(0)\) dla każdego \(t \in [t_1, t_2)\), i tak dalej. Powyższe czasy \(t_1, t_2, \ldots\) zależą oczywiście od wyboru \(\omega\). Dla każdego \(\omega \in \Omega\), istnieje zatem ciąg \[ T_0(\omega) = 0 < T_1(\omega) \leq T_2(\omega) \leq T_3(\omega) \leq \dots \leq \infty, \] taki, że \(X_t(\omega) = X_0(\omega)\) dla każdego \(t \in [0, T_1(\omega))\) oraz dla każdej liczby całkowitej \(i \geq 1\), warunek \(T_i(\omega) < \infty\) implikuje \(T_i(\omega) < T_{i+1}(\omega)\), \(X_{T_i(\omega)}(\omega) \neq X_{T_{i-1}(\omega)}(\omega)\) i \(X_t(\omega) = X_{T_i(\omega)}(\omega)\) dla każdego \(t \in [T_i(\omega), T_{i+1}(\omega))\). Co więcej, \(T_n(\omega) \uparrow \infty\), gdy \(n \to \infty\). Nietrudno jest sprawdzić, że \(T_0, T_1, T_2, \dots\) są czasami stopu. Na przykład, \[ \{ T_1 \leq t \} = \{X(t) \neq X(0)\} \cup \bigcup_{q \in (0, 1) \cap \mathbb{Q}} \{ X_q \neq X_0 \} \in \mathcal{F}_t. \] Przypomnijmy, że dla \(\lambda > 0\), dodatnia zmienna losowa \(U\) ma rozkład wykładniczy z parametrem \(\lambda\), jeśli \(\mathbb{P}[U > r] = e^{-\lambda r}\) dla każdego \(r \geq 0\). W poniższym lemacie przyjmujemy konwencję, że zmienna losowa wykładnicza o parametrze \(0\) jest równa \(\infty\) prawie na pewno.
Lemma 1 Niech \(x \in S\). Istnieje rzeczywista liczba \(c(x) \geq 0\), taka że zmienna losowa \(T_1\) ma rozkład wykładniczy z parametrem \(c(x)\) pod \(\mathbf{P}_x\). Co więcej, jeśli \(c(x) > 0\), to \(T_1\) i \(X_{T_1}\) są niezależne pod \(\mathbf{P}_x\).
Proof. Niech \(s, t \geq 0\). Mamy \[ \mathbf{P}_x[T_1 > s + t] = \mathbf{E}_x[\mathbf{1}_{\{T_1 > s\}} \Phi \circ \theta_s], \] gdzie \(\Phi(\omega) = \mathbf{1}_{\{\omega(r)=\omega(0), \, \forall r \in [0,t]\}}\). Używając własności Markowa, dostajemy \[\begin{multline*} \mathbf{P}_x[T_1 > s + t] = \mathbf{E}_x[\mathbf{1}_{\{T_1 > s\}} \mathbf{E}_x[\Phi]] \\ = \mathbf{E}_x[\mathbf{1}_{\{T_1 > s\}} \mathbf{P}_x[T_1 > t]] = \mathbf{P}_x[T_1 > s] \mathbf{P}_x[T_1 > t], \end{multline*}\] co implikuje, że \(T_1\) ma rozkład wykładniczy pod \(\mathbf{P}_x\).
Załóżmy teraz, że \(c(x) > 0\). Wówczas \(T_1 < \infty\), \(\mathbf{P}_x\) prawie na pewno. Dla każdego \(t \geq 0\) i \(y \in S\), \[\begin{equation*} \mathbf{P}_x[T_1 > t, X_{T_1} = y] = \mathbf{E}_x[\mathbf{1}_{\{T_1 > t\}} \Psi \circ \theta_t ], \end{equation*}\] gdzie dla \(\omega \in \Omega\), \(\Psi(\omega) = 0\) jeśli \(\omega\) jest stałe, a w przeciwnym razie \(\Psi(\omega) = \mathbf{1}_{\{ \gamma_1(\omega) = y\}}\), gdzie \(\gamma_1(\omega)\) jest wartością \(\omega\) po jego pierwszym skoku. Zatem mamy \[\begin{multline*} \mathbf{P}_x[T_1 > t, X_{T_1} = y] = \mathbf{E}_x [\mathbf{1}_{\{T_1 > t\}} \mathbf{E}_x[\Psi ]] = \\ \mathbf{E}_x[\mathbf{1}_{\{T_1 > t\}} \mathbf{P}_x[X_{T_1} = y]] = \mathbf{P}_x[T_1 > t] \mathbf{P}_x[X_{T_1} = y], \end{multline*}\] co daje pożądaną niezależność.
Punkty, dla których \(c(x) = 0\), są stanami pochłaniającymi dla procesu Markowa, w tym sensie, że \(\mathbf{P}_x[X_t = x, \, \forall t \geq 0] = 1\). Dla każdych \(x, y \in S\) definiujemy \[\begin{equation*} \Pi(x, y) = \left\{ \begin{array}{cc} \mathbf{P}_x[X_{T_1} = y] & c(x)>0 \\ \delta_x(y) & c(x)=0 \end{array}\right. \end{equation*}\] Zauważmy, że \(\Pi(x, \cdot)\) jest miarą prawdopodobieństwa na \(S\).
Twierdzenie 6 Niech \((\mathbf{P}, \mathbb{F})\) będzie łańcuchem Markowa w czasie ciągłym takim, że \(\sup_{x \in S} c(x) < \infty\). Wówczas \[\begin{equation*} \frac{\mathrm{d}}{\mathrm{d} t} \left. \mathbb{P}_x[X_t=y]\right|_{t=0} = c(x) \Pi(x,y). \end{equation*}\]
Proof. Jeśli \(c(x) = 0\), to \(\mathbf{P}_x[X_t=x] = \mathbf{P}_x[X_0 =x]=1\), i stąd \[\begin{equation*} \lim_{t \to 0} \frac{\mathbf{P}_x[X_t=x] - 1}{t} = 0. \end{equation*}\] Załóżmy teraz, że \(c(x) > 0\). Najpierw zauważmy, że \[\begin{equation} \mathbf{P}_x[T_2 \leq t] = O\left(t^2\right) \tag{4} \end{equation}\] gdy \(t \to 0\). Rzeczywiście, używając silnej własności Markowa w \(T_1\), \[\begin{equation*} \mathbf{P}_x[T_2 \leq t] \leq \mathbf{P}x[T_1 \leq t, T_2 \leq T_1 + t] = \mathbf{E}_x[\mathbf{1}_{\{T_1 \leq t\}} \mathbf{E}_{X_{T_1}}[T_1 \leq t]], \end{equation*}\] i możemy oszacować \[\begin{equation*} \mathbf{P}_{X_{T_1}}[T_1 \leq t] \leq \sup_{y \in S} \mathbf{P}_y[T_1 \leq t] \leq \sup_{y \in S} c(y), \end{equation*}\] co daje oczekiwany wynik, ponieważ mamy również \(\mathbf{P}_x[T_1 \leq t] \leq c(x)t\). Z (4) wynika, że \[\begin{multline*} \mathbf{P}_x[X_t=y] = \mathbf{P}_x[X_t=y, \: T_1 > t] + \mathbf{P}_x[X_{T_1}=y, \: T_1 \leq t] + O(t^2) \\ = \delta_{x}(y) e^{-c(x)t} + \left(1 - e^{-c(x)t}\right)\Pi(x,y) + O(t^2), \end{multline*}\] używając niezależności \(T_1\) i \(X_{T_1}\) oraz definicji \(\Pi(x, y)\). Dochodzimy do wniosku, że skoro \(\mathbf{P}_x[X_0=y] = \delta_x(y)\), to \[\begin{equation*} \frac{\mathbf{P}_x[X_t=y] - \mathbf{P}_x[X_0=y]}{t} \to -c(x)\delta_{x}(y) + c(x)\Pi(x,y). \end{equation*}\] co kończy dowód.
Kolejne twierdzenie dostarcza pełnego opisu ścieżek procesu \(X\) pod \(\mathbf{P}_x\). Dla uproszczenia zakładamy, że nie ma stanów pochłaniających, ale czytelnik łatwo rozszerzy stwierdzenie na przypadek ogólny.
Twierdzenie 7 Zakładamy, że \(c(y) > 0\) dla każdego \(y \in S\) i że \(\sup_{y \in S} c(y) < \infty\). Niech \(x \in S\). Wówczas, \(\mathbf{P}_x\) p.n., czasy skoku \(T_1 < T_2 < T_3 < \dots\) są skończone, a ciąg \(X_0, X_{T_1}, X_{T_2}, \dots\) pod \(\mathbf{P}_x\) jest dyskretnym łańcuchem Markowa z macierzą przejścia \(\Pi\) rozpoczętym w \(x\). Ponadto, pod warunkiem \((X_0, X_{T_1}, X_{T_2}, \dots)\), zmienne losowe \(T_1 - T_0, T_2 - T_1, \dots\) są niezależne, a dla każdej liczby całkowitej \(i \geq 0\), rozkład warunkowy \(T_{i+1} - T_i\) jest wykładniczy z parametrem \(c(X_{T_i})\).
Proof. Zastosowanie silnej własności Markowa pokazuje, że wszystkie czasy stopu \(T_1, T_2, \dots\) są skończone \(\mathbf{P}_x\)-p.n. Następnie, niech \(y, z \in S\), a \(f_1, f_2 \colon S \to \mathbb{R}\). Używając silnej własności Markowa w \(T_1\): \[\begin{multline*} \mathbf{E}_x[\mathbf{1}_{\{X_{T_1} = y\}} f_1(T_1) 1_{\{X_{T_2} = z\}} f_2(T_2 - T_1)]\\ = \mathbf{E}_x[\mathbf{1}_{\{X_{T_1} = y\}} f_1(T_1) \mathbf{E}_x[\mathbf{1}_{\{X_{T_2} = z\}} f_2(T_2 - T_1)]] \\ = \Pi(x, y) \Pi(y, z) \int_0^\infty e^{-c(x)s_1} f_1(s_1)\mathrm{d} s_1 \int_0^\infty e^{-c(y)s_2} f_2(s_2) \mathrm{d} s_2. \end{multline*}\] Postępując indukcyjnie, otrzymujemy dla każdych \(y_1, \dots, y_p \in S\) oraz \(f_1, \dots, f_p \colon S \to \mathbb{R}\): \[\begin{multline*} \mathbf{E}_x[\mathbf{1}_{\{X_{T_1} = y_1\}} \mathbf{1}_{\{X_{T_2} = y_2\}} \dots \mathbf{1}_{\{X_{T_p} = y_p\}} f_1(T_1) f_2(T_2 - T_1) \dots f_p(T_p - T_{p-1})] \\ = \Pi(x, y_1) \Pi(y_1, y_2) \dots \Pi(y_{p-1}, y_p) \prod_{i=1}^p \left( \int_0^\infty e^{-c(y_{i-1})s} f_i(s) \mathrm{d} s\right), \end{multline*}\] gdzie \(y_0 = x\).
Z powyższego twierdzenia wynika charakteryzacja łańcucha Markowa w terminach \(Q\)-macierzy. Przez \(\mathbb{F}^X = (\mathcal{F}_t^X)_t\) oznaczać będziemy najmniejszą możliwą filtrację, tj. \[\begin{equation*} \mathcal{F}_t = \sigma(X_s \: : \: s \leq t). \end{equation*}\]
Wniosek 1 Niech \(q = (q(x,y))_{x,y\in S}\) będzie \(Q\)-macierzą taką, że \(\sup_{x \in S}|q(x,x)| < \infty\). Wówczas istnieje jedyna rodzina miar \(\mathbf{P}\) taka, że \((\mathbf{P}, \mathbb{F}^X)\) jest łańcuchem Markowa stowarzyszonym z \(Q\)-macierzą \(q\).
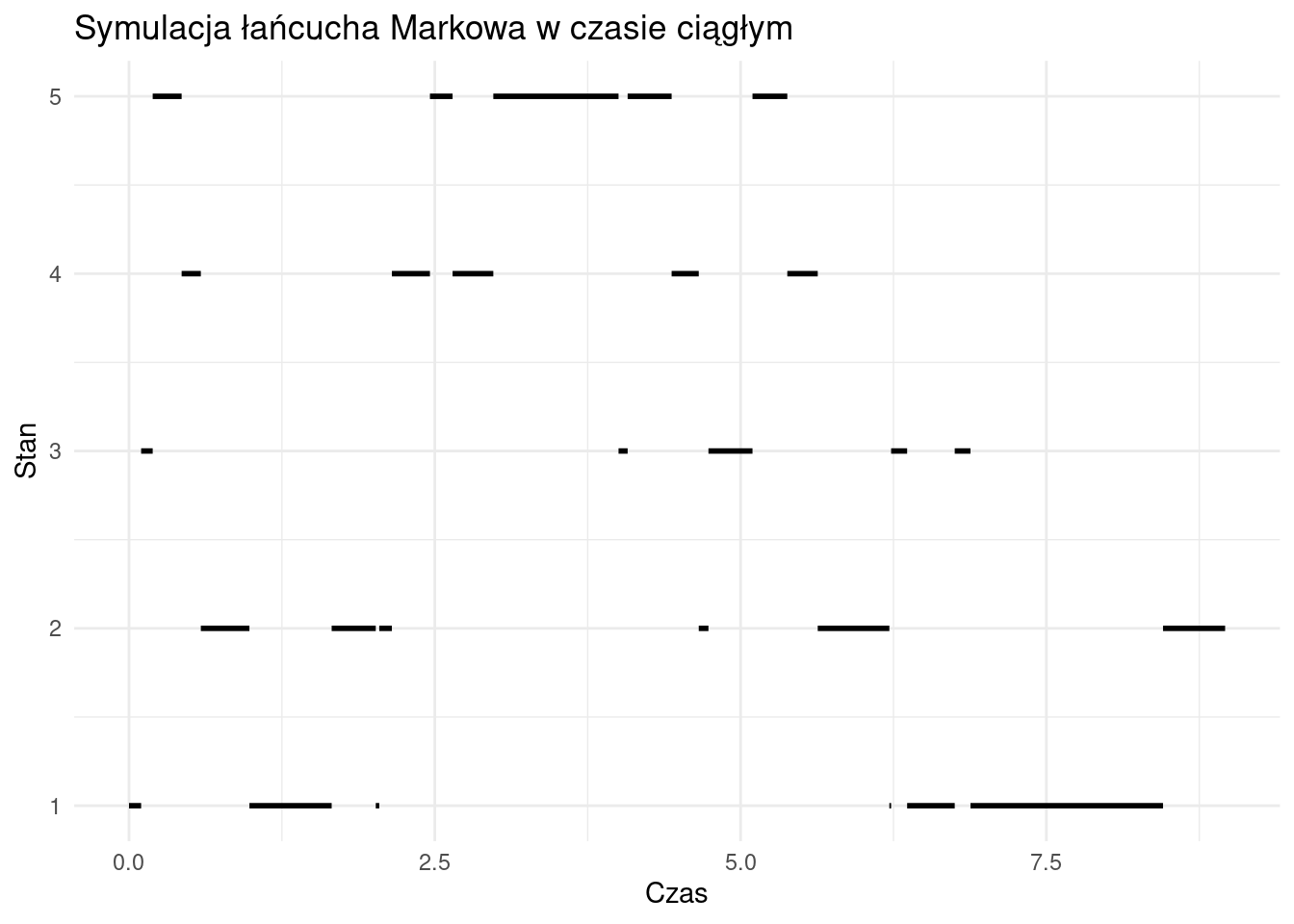
Symulacja łańcucha Markowa w czasie ciągłym
W tej sekcji przedstawimy, jak zaimplementować i zwizualizować łańcuch Markowa w czasie ciągłym z 5 stanami.
# Funkcja do symulacji łańcucha Markowa w czasie ciągłym
simulate_markov_chain <- function(Q, initial_state, time_horizon) {
states <- nrow(Q)
state <- initial_state
time <- 0
times <- c(0)
trajectory <- c(state)
while (time < time_horizon) {
rate <- -Q[state, state] # Intensywność opuszczenia stanu
if (rate == 0) {
break
}
waiting_time <- rexp(1, rate) # Czas do następnego zdarzenia
time <- time + waiting_time
if (time > time_horizon) {
break
}
times <- c(times, time)
# Prawdopodobieństwa przejść do innych stanów
probs <- Q[state, ]
probs[state] <- 0 # Usuwamy intensywność własną
probs <- probs / sum(probs)
state <- sample(1:states, 1, prob = probs) # Nowy stan
trajectory <- c(trajectory, state)
}
return(data.frame(time = times, state = trajectory))
}
# Macierz przejść (generator Q)
Q <- matrix(c(-2, 1, 1, 0, 0,
1, -3, 1, 1, 0,
1, 1, -3, 0, 1,
0, 1, 0, -2, 1,
0, 0, 1, 1, -2), byrow = TRUE, nrow = 5)
# Symulacja łańcucha Markowa
set.seed(42) # Ustalenie ziarna dla powtarzalności wyników
initial_state <- 1
czas_horyzont <- 10
data <- simulate_markov_chain(Q, initial_state, czas_horyzont)
# Przygotowanie danych do wykresu kawałkami stałego
prepare_data_for_step <- function(data) {
result <- data.frame(
x_start = head(data$time, -1),
x_end = tail(data$time, -1),
state = head(data$state, -1)
)
return(result)
}
# Przygotowanie danych
step_data <- prepare_data_for_step(data)
# Tworzenie wykresu kawałkami stałego
ggplot(step_data, aes(x = x_start, y = state)) +
geom_segment(aes(xend = x_end, yend = state), size = 1) +
scale_y_continuous(breaks = 1:5) +
labs(
title = "Symulacja łańcucha Markowa w czasie ciągłym",
x = "Czas",
y = "Stan"
) +
theme_minimal()